Távérzékelési technológiák és térinformatika online, a szolgáltatók és felhasználók online folyóirata
Megjelenik évente két alkalommal
ISSN 2062-8617
Főszerkesztő:
Bakó Gábor
Szerkesztők:
Bartha Csaba
Gruber Anita
Kardeván Péter
Lelleiné Kovács Eszter
Licskó Béla
Nagy János
Szerdahelyi Tibor
Zentai László
Szerkesztőség:
1117 Budapest, Pázmány Péter sétány 1/A
Postacím: 2314 Halásztelek II. Rákóczi Ferenc út 42.
Telefon:
06 70 615 7223
e-mail:
Hirdetésszervezés:
Gruber Anita
+36-30-342-45-69
További munkatársak:
Mészáros János
Molnár Zsolt
Design:
Göttinger Erika
T-Futaki Csenge
![]()
Az adat keletkezésétől a felhasználásig
Mobil térképezéses adatgyűjtés és a felmérési adatok megjelenítése
RS&GIS - 2012 / 1. Maros Olivér1
Abstract: Over the last 20 years, mobile mapping systems have slowly developed from academic research projects to state-of-the-art technology thus in the last few years a number of commercially build systems have appeared. Mobile mapping technology is utilized for the collection of data on road infrastructure or building facades, but first of all some very big companies such as Google and Microsoft created a strong advertisement and demand for the technology. This has resulted rapid development of the technology which can now be regarded as being well established and proven. Recently the rare several mobile mapping system offers available and the question is now increasingly how to manage and display the huge unstructured captured datasets.
This article gives an introduction to the technology and shares the experiences of the first hungarian owned and run mobile mapping system. In addition it describes a new concept to display mobile mapped datasets.
- 1. Felmérés mobil térképezéssel
A mobil térképező rendszerek fejlesztése közel két évtizedes múltra tekint vissza. A rendszerek tervezésének célja az úthálózat és környezetének lézer szkennelése, a bejárt terület teljes körű, helyazonosított képi dokumentálása. Az elmúlt évek fejlesztéseinek eredményeképpen áttörés történt a területen és számos komplex mobil térképező megoldás jelent meg a piacon.
A felmérési technológia egyedülállóan termelékeny, amely jelentős mértékben alakítja át a térinformatikáról alkotott szemléletet és a felhasználói igényeket; ezért a Konasoft Kft. 2011. elején, Magyarországon elsőként állított üzembe komplex mobil térképező rendszert.
A mobil térképezés a hagyományos felmérési módszereket alkalmazó összetett megoldás, ami egyesíti a valósidejű helymeghatározást, a háromdimenziós lézer-szkennelést, valamint a felmérési terület folyamatos fényképezését.
1.1. Adatgyűjtés
A felmérés során a helymeghatározó és képalkotó rendszerek folyamatos adatgyűjtést végeznek.
A rendszer pozíciójának meghatározása NAVSTAR és GLONASS GNSS vevő segítségével történik. A műholdas helymeghatározásból adódó bizonytalansági hatások minimalizálása céljából a berendezés méri a hordozó gépjármű kerekeinek elfordulását és a gépjármű különböző irányú gyorsulását (utóbbit hat-tengelyű tehetetlenségi mérőegységgel - Ring LaserGyroIMU).
A képalkotást szférikus panoráma kamera rendszer végzi, hat darab két megapixeles professzionális CCD kamerával, melyek közül öt oldalirányba egy pedig fölfelé néz. A kamera rendszer másodpercenként legfeljebb 15 képsorozat készítésére alkalmas; az expozíciós idő beállítása az eltelt idő vagy a megtett távolság alapján paraméterezhető.
A berendezésen rögzített lézer szkennerek folyamatosan pásztázzák a teret, másodpercenként 40.000 georeferált pont adatot gyűjtve. A szkennerek közül kettő menetirányra merőlegesen, függőlegesen pásztázza a teret 180°-os tartományban; egy pedig a gépjármű mögött az út felületét 90°-os tartományban. A szkenner konfigurációval a rendszer 30-40 méter sugarú környezetében valósítható meg a 3D adatgyűjtés, a visszaverődési pontok helyzetének a rendszerhez képesti meghatározásával.

1. ábra. Mobil térképező rendszer működése
A helymeghatározó és képalkotó rendszerek adatait egy központi egység látja el időbélyeggel, 15 ns (ezred milliomod másodperc) pontossággal. A keletkező - képsűrűségtől függően óránként kb. 15-25 GB nagyságú - adatfolyam gyűjtése a gépjárműben elhelyezett számítógépen történik.
1.2. Utófeldolgozás
Az egyedi képek kiigazításos illesztésével készülnek a megjelenítendő panorámaképek.
A gyűjtött adatok utófeldolgozása során permanens bázisállomás(ok) vagy virtuális állomás(ok) észlelési adataival történik a pozíció adatok korrigálása. Az utófeldolgozás számítási kapacitás igénye miatt a feldolgozás alapvetően 1Hz RINEX adatokkal történik, de a feldolgozó algoritmus támogatja a 10Hz adatokkal történő utófeldolgozást is.
Utolsó lépésként a szkennelési és pozíció adatokból történik a korrigált koordináta pontfelhő generálása és színezése, valamint a keletkezett állományok exportja.
Utófeldolgozás során lehetőség van a felmérési állományok automatikus, szoftverrel támogatott adattisztítására, ami a helymeghatározás pillanatnyi hibáiból eredő (önmagában nagy belső pontosságú, konzisztens) állományokat szinkronizálja. Az eljárás a bejárások keresztező szakaszait vízszintes és magassági értelemben szinkronizálja; aminek eredményeképpen a keresztező bejárások és a többszörösen felvételezett állományok felületei (pl.: felsővezetékek, épület sarkok, gépjármű kontúrok) nem szellemképesek, homogének lesznek.
Az adattisztítási eljárás helyreállítja a felmérési állomány belső konzisztenciáját, azaz a relatív pontosságot. Ezzel általánosságban javítjuk az állomány abszolút pontosságát, de nem minden egyes érték esetében automatikusan, ezért a tisztított állományokon kontrolpontok utólagos használatával érhető el a fentiekkel megegyező mértékű abszolút pontosság.
Az utófeldolgozást követően - a képi és szkennelt adatok konzisztenciájának köszönhetően - a megjelenített állományokban a panorámaképek és a koordináta pontfelhő használatával pont, vonal és sokszög vonal mérés végezhető; valamint a mérési adatok exportálhatók.
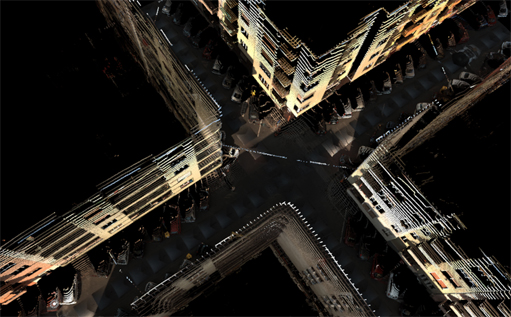
2. ábra Városi felmérés adattisztítás után
- 2. Felmérési pontosság
A mobil térképezéses felmérés egy összetett tevékenység, aminek a végeredménye rengeteg környezeti és technikai körülmény együttes hatására alakul ki. Ezért pontosság tekintetében a teljes rendszer végeredményét (adatgyűjtés, feldolgozás, megjelenítés) érdemes vizsgálni. Bizonyos mértékig vizsgálható egyes - hardver és szoftver - komponensek szerepe a végeredményben, de ezek módosításában (pl.: hardver csere, eszköz vagy szoftver kalibráció) a rendszer komplexitása miatt kicsi a mozgásterünk.
Általánosságban a felmérési pontosság nagymértékben javítható jó GNSS rálátással rendelkező területen történő inicializálással, illetve ennek a területnek az adatgyűjtés előtti és utáni többszöri, ismételt bejárásával; valamint városi területeken a fedett területek gyors bejárásával és nyílt tereken történő menet közbeni „inicializálással”.
A pontosság kérdését relatív és abszolút pontosság szempontja szerint célszerű megközelíteni.
2.1. Relatív pontosság
Relatív pontosságalatt az egyszeri felmérés (bejárás) keretében végzett adatgyűjtés eredményén (pontfelhőn)végzett mérések eredményét értjük.
A rendszer konfiguráció és kalibráció geodéziai szintű relatív pontosságot biztosít, ami a megjelenített panorámaképekkel konzisztens. Relatív pontosság tekintetében megállapítható, hogy ezt gyakorlatilag csak a pontfelhő sűrűsége korlátozza, amit - amennyiben a feladat azt indokolja - célszerű a koordináta pontfelhő interpolációjával sűríteni; ezáltal a relatív pontosság a gépjárműtől távolabbi pontok esetében is optimális szinten tartható.
Relatív pontosság szemléltetésére szolgál a 4. ábra, amely egy autópálya szakasz oldalesés mérés eredményeit mutatja be. Az adatgyűjtést 80 km/h haladási sebességgel végeztük, a kiértékelést pedig irodai környezetben történt.
Az oldalesés mérése 20 méterenként, (két mért sáv esetén) 7,5 méteres keresztszelvényeken történik; célja az autópálya csapadék elvezetési képességének vizsgálata. Az autópálya oldalesése az útvonal ívének függvényében +5,5 és -5,5 százalék közötti tartományban található, és 1 centiméteres magasság különbség 0,13%-os oldalesés különbséget eredményez. Az eredmények összehasonlításával megállapítható, hogy a mobil térképezés alkalmas ilyen pontosságú mérések végzésére; a rendszer relatív pontossága 1 centiméteren belüli értéket mutat (a leírt körülmények között). A mért eredmények (0023+520 és 0025+060 szelvényeknél) látható eltérése az autópálya és a mérési szelvényezés egymáshoz viszonyított elcsúszására vezethető vissza.
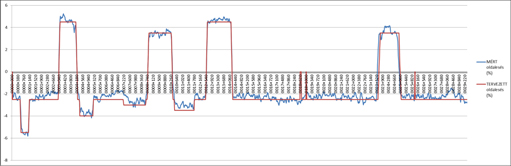
3. ábra Autópálya szakasz oldalesés mérés eredményei (2011.szeptember)
2.2. Abszolút pontosság
Abszolút pontosság mérésére geodéziai mérőállomással bemért és felismerhetően megjelölt, mm pontosságú referencia pontok helyzetét határoztuk meg mobil térképező rendszerrel. A teszt során optimális körülmények mellett (30 km/h haladási sebesség, jó GNSS vétel) 2-3 cm szintű eltérés volt tapasztalható a referencia eredményekhez képest. Nagyobb sebesség és/vagy nagyobb pontossági igény esetén, az adatok utófeldolgozását 10Hz bázisállomás adatokkal célszerű végezni, mivel az 1Hz adatok már nem biztosítják a kellő sűrűségű pontosítást.
Magasan beépített, fedett területeken az abszolút pontosság akár lényegesen rosszabb is lehet, aminek az eredményképpen a keresztező bejárások koordináta pontfelhői sem vízszintes, sem magassági értelemben nem konzisztensek, azaz akülönböző irányú pontatlanságok eredményeként a keresztező pontfelhők szellemképesek. Ilyen területeken az automatikus adattisztítást használva is tökéletesen javítható az állomány konzisztenciája (ld. 3. ábra), azonban az abszolút pontosság (pontatlanság) mértéke akár +/- 50 cm is lehet. Ezért ezeken a területeken - amennyiben ez releváns - kontrolponttal kell javítani az adott bejárás abszolút pontosságát.
Pontosság tekintetében a bejárások időbeni hossza és térbeli kiterjedtsége is korlátozó tényező; ami a helymeghatározás pontatlanságának időbeni halmozódásából, egymásra rakódásából, valamint a feldolgozó és adattisztító algoritmusok technológiai korlátaiból következik. Ennek megelőzésére a terepi adatgyűjtési egységeket érdemes távolság szerint és időben is - 2-2,5 órában korlátozni.Célszerű a felmérési területeketúgy kialakítani, hogy a valódi vagy virtuális bázisállomástól mért távolságok kis mértékben változzanak például négyzetes vagy körszerű egységek képzésével.(Ezek a korlátozások nagy területek geodéziai pontosságú felmérése esetén szükségesek).
2.3. Teszt mérések
2011. őszén tesztméréseket végeztünk az állami földmérés szakembereivel. A mérések célja nagy területek mobil térképezéses felmérésének megvalósíthatósági vizsgálata volt.
Előzetesen meghatározásra került, hogy milyen munkaterületek lesznek kiválasztva, ahol ellenőrizni lehet a rendszer megbízhatóságát. A cél az volt, hogy többféle mérési körülmény és környezet közepette végezzük el a vizsgálatot. Egy-egy útszakasz legalább kétszer került bejárásra, így a több mérési adat miatt, elvben javul a teszt megbízhatósága. Négy teszt-területet jelöltünk ki, amelyek különböző fedettséggel, beépítési móddal, forgalmi helyzettel rendelkeztek; a tesztméréseket a megengedett legnagyobb forgalmi sebességgel végeztük.
A mobil térképezéssel felmért koordináták WGS formátumúak, amelyet a FÖMI EHT2 4.1 transzformációs programmal számítottak át EOV rendszerbe. A felméréshez hálózati GNSS vevőt és 3” mérési pontosságú mérőállomást használtunk.Az alappont meghatározása GNSS vevővel, hálózati RTK mérési módszerrel, VITEL transzformációval történt, így közvetlenül EOV koordinátákhoz jutottak. A részletpontokat poláris méréssel határozták meg. Az így elért pontosság 1-2 cm körül van.
Területei egységenként 10-40 ellenőrzési pontot vizsgáltunk, valamint azonos területek különböző időben rögzített felméréseit. A teszt kitért az egymástól távoli felmérések közötti pontossági viszonyok meghatározására
A teszt rövid összefoglalásának eredménye, hogy a mobil térképezés önmagában nem ad választ minden területen a pontosság teljes igényére, ezért nagy területek mobil térképezéses felmérésékor az önmagukban konzisztens bejárási szakaszokat kontrolpontok használatával kell beilleszteni a felmért terület megfelelő szakaszába.
2.4. Pontosság javítása kontrolponttal
A pontosság kontrolponttal végzett javítása pontfelhőben történik, itt tereptárgyak meghatározásával és a „valós” koordináták megadásával kell az adatgyűjtési állományt újragenerálni. Az eljárással nagy relatív pontosságú adatok abszolút pontossága javítható, a kontrolpontok elhelyezkedésétől függően akár a rendszer fentebb bemutatott pontossági szintjéig. A kontrolpontos javítás során körültekintően kell eljárni mivel minden egyes kontrolpont egy adott hatósugárban és irányban módosítja a pontfelhő elhelyezkedését.
- 3. Képek további feldolgozása
Az automatizált adatgyűjtés kapcsán felmerülő kérdés a képi állományok automatikus (szoftverrel támogatott) felismerése. Az automatikus felismerés véleményünk szerint gyenge hatásfokkal megvalósítható körülményes eljárás- jelenleg. Hátránya, hogy - a példa kedvéért - 100 kilométeren készülő 20.000 panorámakép (5 méterenként készített képek esetén) kiértékelése a projekt kereteit túlnövő számítási kapacitást igényel; továbbá minden tereptárgy több képen is azonosításra kerül, aminek eredményeit egy újabb számítási ciklus keretében szükséges validálni. A látás és észlelés az emberi agy egyik legmagasabb szintű teljesítménye, aminek működését lehetetlen szimulálni, ezért automatizált felismerési folyamat eredményét végső soron emberi ellenőrzésnek kell jóváhagynia.
Az automatikus felismerés fotogrammetriai eljárás, ami nem használja a koordináta pontfelhőt, így nem rendelkezik annak további előnyeivel.
Projektek során a fényképek személyes tartalmára és a nagyméretű képi állományokra tekintettel az adatok tárolása és kezelése csak szabályozott adatkezelési eljárásoknak megfelelően történhet.A felhasználók csak a munkavégzésükhöz feltétlenül szükséges mennyiségű adathoz férhetnek hozzá, továbbá biztosítani kell a személyi és központi számítógépeken, hogy az adatok ne legyenek jogosulatlanul másolhatók. Az adatkezelés célhoz kötöttségét előíró (jelenlegi hazai) jogi szabályozás miatt, a képekről történő adatrögzítést legkésőbb a projekt zárását követően meg kell semmisíteni a képeket; vagy az átadásra kerülő panorámaképeken biztosítani kell a személyes adatok anominizálását úgy, hogy azok semmilyen eljárással ne legyenek később visszaállíthatók.
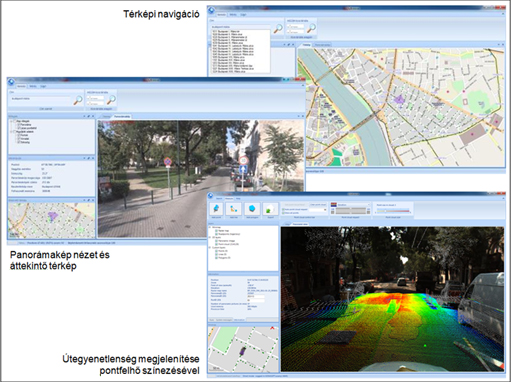
- 4. Megjelenítés
A képi állományok használatával hatékonyan végezhető a „terepi” adatgyűjtés, adatrögzítés és adatbázis építés, aminek alapfeltétele a felismerés, rögzítés, ellenőrzés, javítás és kivétel kezelés folyamatát támogató szoftveres alkalmazás.
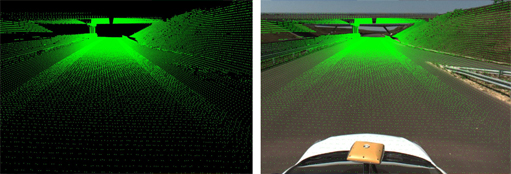
4. ábra Pontfelhő, valamint panorámakép és pontfelhő együttes megjelenítése
A komplex mobil térképező rendszerek tartalmaznak adatgyűjtő, feldolgozó és megjelenítő célalkalmazásokat is, ezek azonban önálló, elszigetelt alkalmazások, amelyek sem egymással, sem más alkalmazásokkal nem képesek kommunikációra. A rendszergyártók által biztosított célalkalmazások csak az igények kisebb-nagyobb részét fedik le, nem rendelkeznek a szoftverek továbbfejlesztéséhez vagy integrációjához szükséges támogatással; a programok közötti adatcsere fájlok exportjával, importjával valósítható csak meg.Ez a megközelítés gátolja a mobil térképezés szélesebb körű elterjedését, mivel a termelékeny adatgyűjtéssel előállított nagy mennyiségű adatból nehezen állítható elő a felhasználók számára szükséges információ. A nagyméretű felmérési állományok kezelésének nehézségei, a csoportmunka támogatásának hiánya és a felhasználók által előállított adatok inkonzisztenciája nem felel meg a vállalati adatkezeléssel szembeni követelményeknek.
Az utófeldolgozás során az adatok szabványos formátumban kiexportálhatók, melyek egyedi szoftver fejlesztés keretében vagy meglévő térinformatikai alkalmazás integrációjával jeleníthetők meg.
A fentieket felismerve a Konasoft Kft. kifejlesztette saját megjelenítő alkalmazását azzal a céllal, hogy az iparágban elsőként szerver-kliens architektúrában és nagyvállalati informatikai környezetben is elérhetővé tegye a mobil térképezéssel felmért adatokat. A fejlesztés célkitűzése az alapigények megvalósítása volt, amire a későbbiekben az egyes szakterületi igények fejlesztése és integrációja épülhet.
4.1. InfoCity3D projekt
A projekt InfoCity3D, a kliens alkalmazás a CityBrowser3Dnevet kapta.
Az InfoCity3D projekt Microsoft .NET fejlesztői környezetben készült.Azalkalmazás a felmérési állományokból exportált panorámaképek és leíró adataik, valamint a koordináta pontfelhő felhasználására épül.
A szerver-kliens architektúra ideális platform vállalati környezetben; ami támogatja a nagy mennyiségű téradat hálózaton keresztül történő optimalizált kiszolgálását, valamint a vállalati jogosultság-kezelési és adatbiztonsági szabályoknak való megfelelést.
A CityBrowser3D moduláris fejlesztési koncepciója biztosítja az egyes funkciók vagy a teljes funkcionalitás integrálását más szerver-kliens vagy web alapú térinformatikai rendszerbe.
A fejlesztés 2011-ben 4 fejlesztő folyamatos munkájával történt, az első modelleket fél évvel a munka megkezdése után mutattuk be.
Az InfoCity3D alkalmazás támogatja:
- a térinformatikai alapú adatkezelést, rétegkezelést;
- térképi navigációt és a panorámakép pozíciók térképi megjelenítését;
- a panorámaképek és a koordináta pontfelhő konzisztens kezelését,
- navigációt a panorámaképeken;
- keresést koordináta, cím, szelvény, vagy attribútum alapján;
- pontok, vonalak, sokszög vonalak mérését és attribútumok hozzáadását,
- adatok exportálását, vagy más GIS rendszer számára adatkapcsolati elérést.
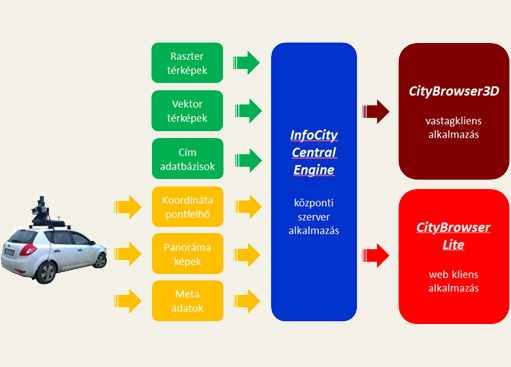
5. ábra InfoCity3D adatmodell
Az alkalmazás szalag-menüs megjelenítéssel és testre szabható felhasználói felülettel rendelkezik, ami támogatja:
- a szoftver ablakok több monitorosmegjelenítését,
- mérési attribútum lista helyi szerkeszthetőségét(lista hierarchia, attribútum típusok: szabad szöveges, legördülő menüs, igen/nem kapcsolók),
- funkció gombok kiosztását.
6. ábraCityBrowser3D kliens
4.2. Továbbfejlesztés
Nagyvállalati bevezetéssorán elkerülhetetlen az EOV transzformáció implementálása. A felmérés és utófeldolgozás eredménye WGS84 rendszerben készül ezért az EOV transzformáció csak utólag valósulhat meg. A teljes szkennelt adtabázis mérete meghaladja a (szabványnak tekintendő) EHT2 programmal transzformálható adatmennyiséget ezért - a WGS84 adatbázis használatával - az EOV transzformációt csak a felhasználók által használt adatokon kell elvégezni valós időben az alkalmazás „felületén” (nem beépítve azt az üzleti logikába). Az EOV transzformáció megvalósítását mintegy megerősíti, hogy a szakma képviselői csaknem teljes egészében egyetértenek abban, hogy fölösleges a pontfelhő minden elemét EOV koordinátákká transzformálni, és úgy tárolni. Minden keresési feladat, metrikus kiértékelés, objektum számolás, relatív hely ellenőrzés, megjelenítés elvégezhető a WGS koordinátákkal; és elegendőa felhasználók által kiválasztott adatok körét- valós időben -az EOVrendszerbe transzformálni.
A funkcionalitás megvalósítható például a VETÜLET vagy a VITEL programok beépítésével a program „felületi” rétegébe, ami kiterjed:
- a kurzorral kiválasztott koordináták átszámítására,
- keresések transzformációjára,
- mérések és export támogatásáravalós időben.
- 5. Összefoglalás
A mobil térképezés a gyártók és szolgáltatók erőfeszítéseinek fókuszában lévő terület, amely az elmúlt évek fejlesztéseinek és a formálódó igényeknek köszönhetően vált egyedi projektekből reprodukálható termékké és arra épülő megoldás csomaggá. Az igények kialakításában fontos szerepet játszottak a navigációs és internetes szolgáltatók; kiváltképp a GoogleStreetview és Microsoft Streetside alkalmazása.
A gyűjtött adatok az útkezelők, közmű szolgáltatók, önkormányzatok, földhivatalok, rendvédelmi szervek és még számos szervezet számára szolgálnak információval. Az adatgyűjtés eddig soha nem tapasztalt sebességgel és adatsűrűséggel, a hagyományos pontossági elvárások teljesülése mellett történik. A felmérés hatékonysága révén a térinformatikai alkalmazások aktuális adatokkal tölthetők fel, növelve ezzel azok hatékonyságát és az azokba fektetett erőforrások nagyobb arányú megtérülését. Az adatgyűjtési eljárás hatékonyságának köszönhetően az adatgyűjtés egyedülállóan kedvező ár-érték arányú és a hagyományos felmérési eljárásokkal versenyképes árfekvésűszolgáltatást képvisel.
A rendszer kompakt kialakítása révén a felépítmény más járművön is telepíthető, kalibrálható. Vasúti hajtányon, hajón, quadon vagy kerékpáron történő elhelyezéssel a technológiára jellemző hatékonysággal mérhető fel és dokumentálható vasúti, folyami vagy egyéb pálya.
2011. óta Magyarországon is elérhetők a mobil térképezésre épülő szolgáltatások.